
最新の研究成果
温室栽培などで用いる栽培方法における農業ロボットの自律走行アルゴリズムを開発
2025年2月20日
- 工学研究科
- プレスリリース
概要
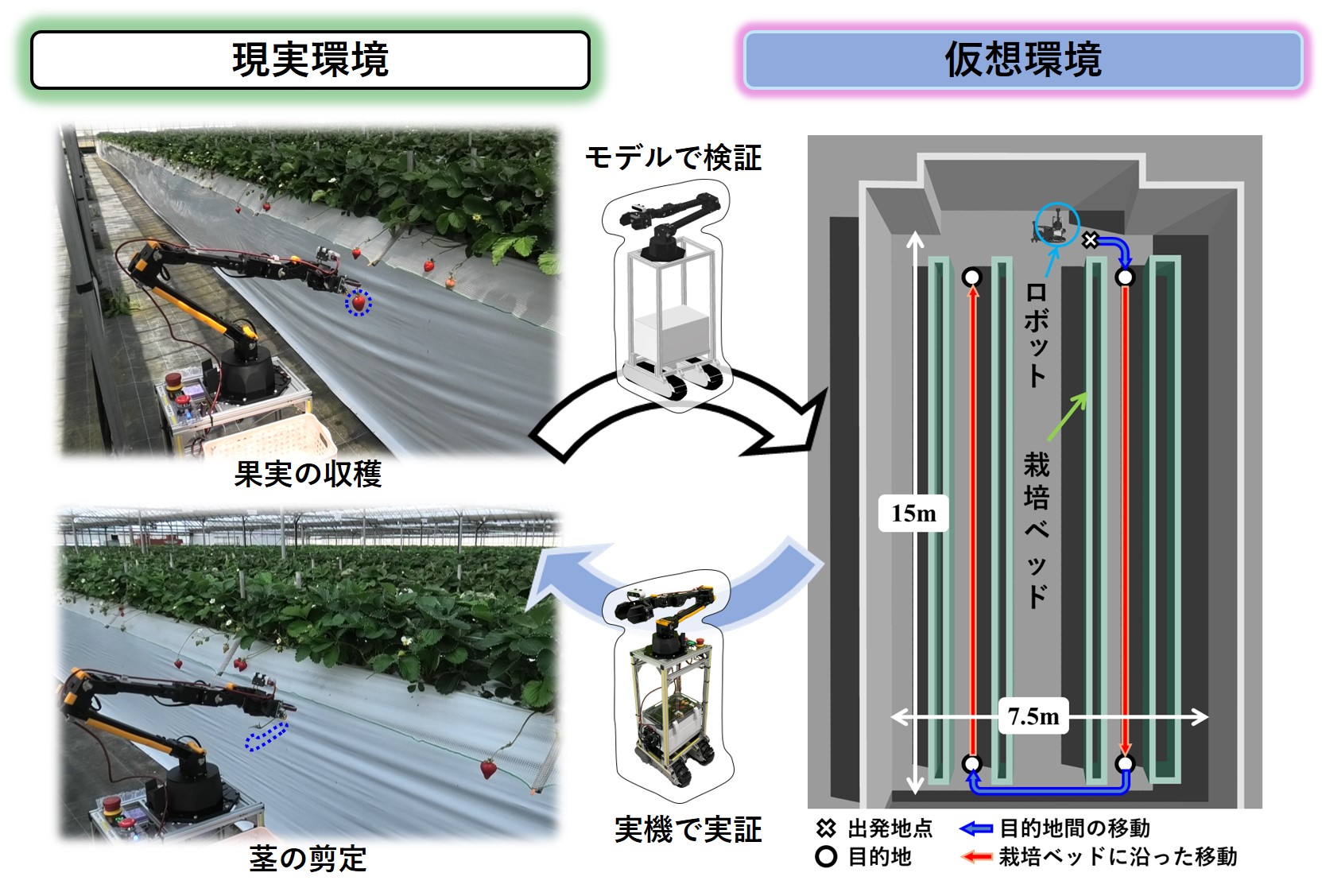
人手不足が深刻化している農業では、ロボットによる作業の自動化が求められています。特にイチゴやトマトなどの施設園芸で用いられる、高い位置に設置した栽培ベッド※1で農作物を育てる高設栽培※2では、ロボットが自分自身の位置を正確に把握することが難しく、収穫作業の自動化に向けた課題の一つです。また、ガイド用のラインなどを農場に設置しロボットを誘導する方法も研究されていますが、ビニールハウスや温室のような1ha以下の小規模農場では、設備投資のコストが大きくなるという問題もありました。
大阪公立大学大学院工学研究科の藤永 拓矢助教は、自動運転車やドローンにも活用されているセンサー「LiDAR」を活用し、あらかじめ指定した目的地までの移動と栽培ベッドに沿った移動の2つのモードを切り替えて自律走行するアルゴリズムを提案。センサーによって、ロボットが「どこに栽培ベッドがあるのか」や「自分の向きは適切か」を判断することで、栽培ベッドとの距離を一定に保ちながら正確に移動できることを、仮想環境での検証および実環境での実証から、その有効性を示しました。本成果をもとに、マルチタスクを処理できる農業ロボットが実用的に使えるようになれば、人手不足の解消や農作業の効率化に繋がることが期待されます。
本研究成果は、2025年2月13日に国際学術誌「Computers and Electronics in Agriculture」のオンライン速報版に掲載されました。
掲載誌情報
【発表雑誌】Computers and Electronics in Agriculture
【論文名】Autonomous navigation method for agricultural robots in high-bed cultivation environments
【著者】Takuya Fujinaga
【掲載URL】https://doi.org/10.1016/j.compag.2025.110001
資金情報
本研究は、公益信託小澤・吉川記念エレクトロニクス研究助成基金の支援を受けて実施しました。
用語解説
※1 栽培ベッド…作物を植えるために、地面より高い位置に設置された栽培スペースのこと。パイプや棚の上に土や培地を置き、植物を育てる高設栽培では、この栽培ベッドが並べられた環境で作物が栽培される。
※2 高設栽培(こうせつさいばい)…作物を地面ではなく、高い位置に設置した栽培ベッドで育てる方法。作業の負担が少なくなるが、ロボットの移動には工夫が必要になる。
研究内容に関する問い合わせ先
大阪公立大学大学院工学研究科
助教 藤永 拓矢(ふじなが たくや)
TEL:072-254-9211
E-mail:tfujijnaga[at]omu.ac.jp
※[at]を@に変更してください。
報道に関する問い合わせ先
大阪公立大学 広報課
担当:竹内
TEL:06-6967-1834
E-mail:koho-list[at]ml.omu.ac.jp
※[at]を@に変更してください。
該当するSDGs
