インフラ点検ドローンの開発
狭隘空間内の複雑構造物を対象とした自律型点検・診断システムの開発
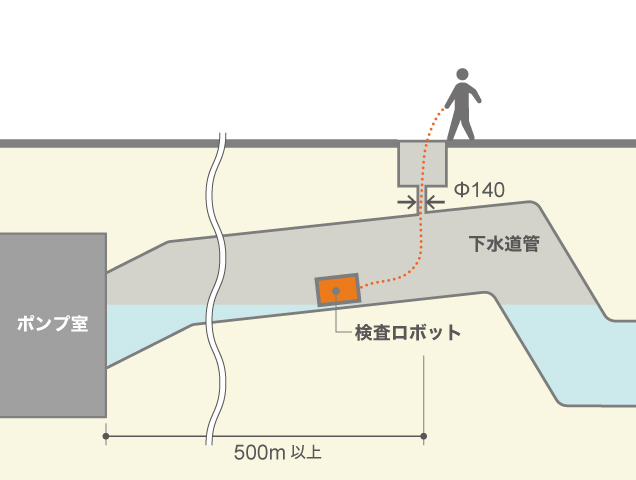
下水道管内部や桟橋下面など立ち入りや点検が難しく、劣化・損傷状況を十分に把握できていないインフラ構造物を研究対象とし、狭い空間内をぶつかることなく自律的に移動し点検するドローンを開発中。
 下水道管内部 (出典:大阪・下水道メンテナンス事業協同組合)
|
 桟橋式岸壁の下面部
|

インフラ点検ドローン開発のポイント
|
1. |
桟橋内部の点検 |
|
|
|
|
2. |
|
吉田研究室が考える対応策
- 点検ドローン(水上ドローンは新規開発、水中ドローンは既存のものを有効活用)による点検
- 画像処理、AIを用いた損傷評価の高精度化
- 高速高精度な3Dプリンターの利用(開発のスピードアップ、複雑部品の製作)