小型宇宙機システム研究センター(SSSRC)がCANSAT 気球試験を行いました
2019年12月15日(日)、小型宇宙機システム研究センター(SSSRC)学生が、CanSat放出実験を行いました。


放出実験
SSSRCに所属する工学域機械系学類一回生の米川雄大さんに当日レポートを書いていただきました。
********************
こんにちは。SSSRCに所属する工学域機械系学類一回生の米川雄大です。SSSRCでは新入生教育としてCansat実習を行います。Cansat実習とは”Cansat”と呼ばれる模擬人工衛星をミッションから自分たちで設定し、開発シーケンスを実際に体験する実習で、この実習を通してプログラミングや電子工作などのアイデアを実現する能力、問題解決能力、プロジェクトマネジメント能力などの衛星・ロケット開発で必要となる基礎的な能力を養います。このCansat実習の最終段階である気球試験が12月15日日曜日に行われました。この試験では、作成したCansatを実際に地上約40mから落下させそれぞれのミッションを遂行できるか試験します。今年は4班に分かれて作成しました。ここでそれぞれの班のCansatを紹介したいと思います。

 まずはA班です。
まずはA班です。
A班は火星での有人探査や移住を想定し、火星上で食用植物が栽培可能かを調査するCansat”Caltiver KASMMY”(Caltiverはスペルミスではなく造語です!!)を作成しました。種まきや水まきなどの農耕に必要となる機構を搭載しており、植物の育成状況を確認するために画像も送信してくれます。
機体サイズ: 横14㎝、縦22.5㎝、高さ12㎝、重量961g
機体仕様の詳細
マイコン |
Mbed LPC1768 |
電源 |
単3ニッケル水素電池×4(マイコンへの給電)単3ニッケル水素電池×4(モーター及びニクロム線への給電) |
通信 |
Xbee pro series 1 |
カメラ |
小型TTLシリアルカメラJPEGカメラ(30万画素、画角60°) |
機体素材 |
ガラスエポキシ板 |
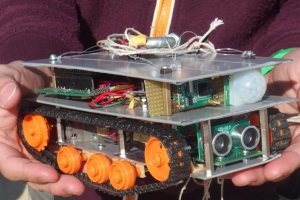
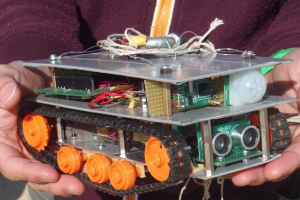 B班は地球外生命体の発見をミッションとした“Wall;E”を作成しました。このCansatは焦電センサで認識した対象をカメラで撮影し画像を送信します。また超音波センサを利用した障害物回避機構を搭載しており、焦電センサに反応があるまで自動で走行して生命体を探します。
B班は地球外生命体の発見をミッションとした“Wall;E”を作成しました。このCansatは焦電センサで認識した対象をカメラで撮影し画像を送信します。また超音波センサを利用した障害物回避機構を搭載しており、焦電センサに反応があるまで自動で走行して生命体を探します。
機体サイズ:横20.8㎝、縦10.2cm、高さ8.7㎝、重量798g
機体仕様の詳細
マイコン |
mbed NXP LPC1768 |
電源 |
エネループ1.3V乾電池 単3×4(モーター及びFET給電用)9V乾電池×1(Mbed給電用) |
通信 |
xbee Pro series 2 |
カメラ |
小型TTLシリアルJPEGカメラ(NTSCビデオ出力付) |
GPSモジュール |
GYSFDMAXB |
モータードライバ |
TB6612FNG搭載 デュアルモータードライバ |
超音波センサー |
超音波距離センサーモジュール US-015 |
焦電センサー |
焦電型赤外線センサーモジュール(焦電人感センサ) |
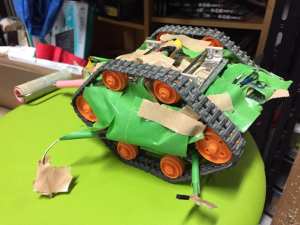 D班は地球外の星の農業利用が可能か否かを調べる“ISOSAT”を作成しました。ミッションは土壌採取と温度データの取得で、機体後方部に設置された粘着クリーナによって表面の土壌を採取します。この機体も超音波センサによる障害物回避機構を搭載しており、土壌採集から採取した土壌の回収までを自動で行います。
D班は地球外の星の農業利用が可能か否かを調べる“ISOSAT”を作成しました。ミッションは土壌採取と温度データの取得で、機体後方部に設置された粘着クリーナによって表面の土壌を採取します。この機体も超音波センサによる障害物回避機構を搭載しており、土壌採集から採取した土壌の回収までを自動で行います。
機体仕様の詳細
マイコン |
mbed LPC1768 |
GPSモジュール |
GYSFDMAXB |
モータードライバ |
TB6612FNG |
超音波センサー |
HC-SR04 |
温度センサー |
TMP102 |
加速度センサ- |
MPU6050 |
DCDCコンバータ |
MAPU01-033S05H |
送受信機 |
xbee Series1 |
 F班は宇宙旅行を疑似的に再現する“Fioresa”を作成しました。ミッションは気球から放出後、落下の様子を撮影し地上に送信するというもので、VRゴーグルなどを利用することで地上にいながらリアルな宇宙旅行体験ができます。滞空時間との勝負になるのでパラシュートを自作し、動画の撮影時間が少しでも長くなるようにしました。
F班は宇宙旅行を疑似的に再現する“Fioresa”を作成しました。ミッションは気球から放出後、落下の様子を撮影し地上に送信するというもので、VRゴーグルなどを利用することで地上にいながらリアルな宇宙旅行体験ができます。滞空時間との勝負になるのでパラシュートを自作し、動画の撮影時間が少しでも長くなるようにしました。
機体サイズ:六角形の一辺 6.5 ㎝、高さ 6.0 ㎝、重量 440 g
機体詳細
マイコン |
Raspberry Pi zero W |
電源 |
単3ニッケル水素電池×4 |
通信 |
Wi-Fi(Raspberry Pi zero W搭載モジュール・androidによるテザリング) |
カメラ |
pi camera |
9軸センサ |
BMX055 |

